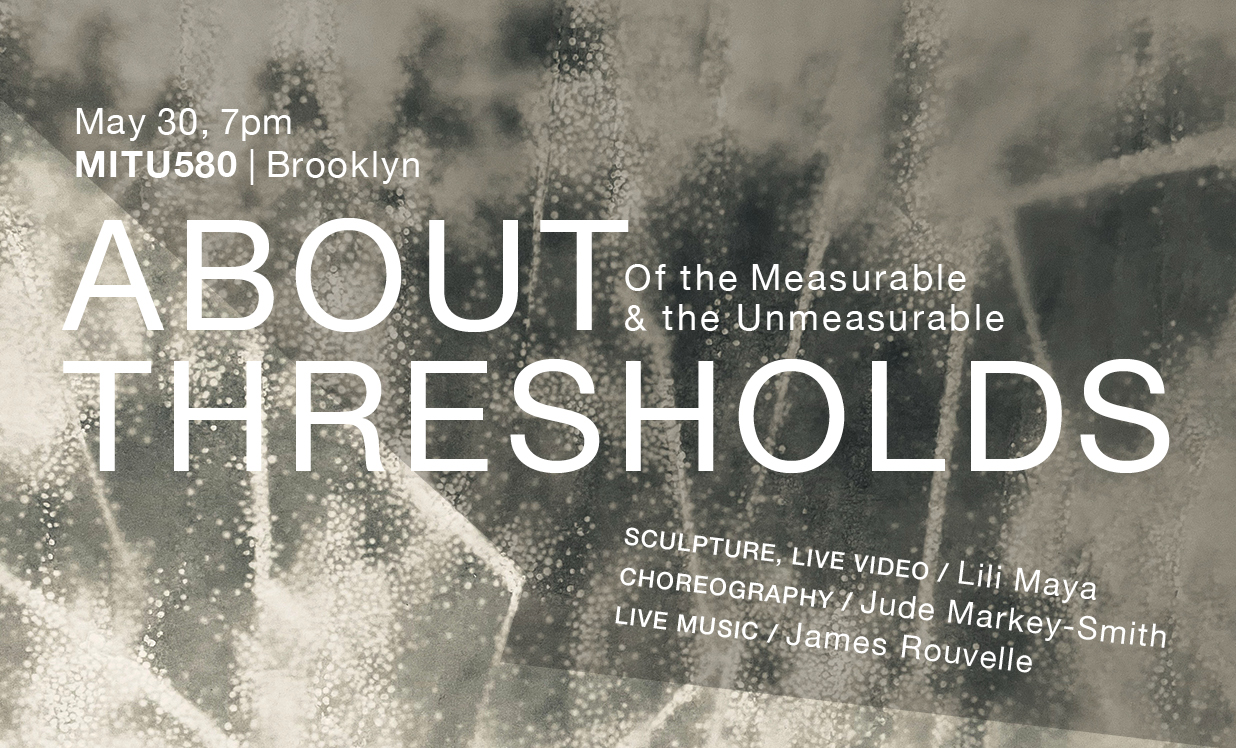
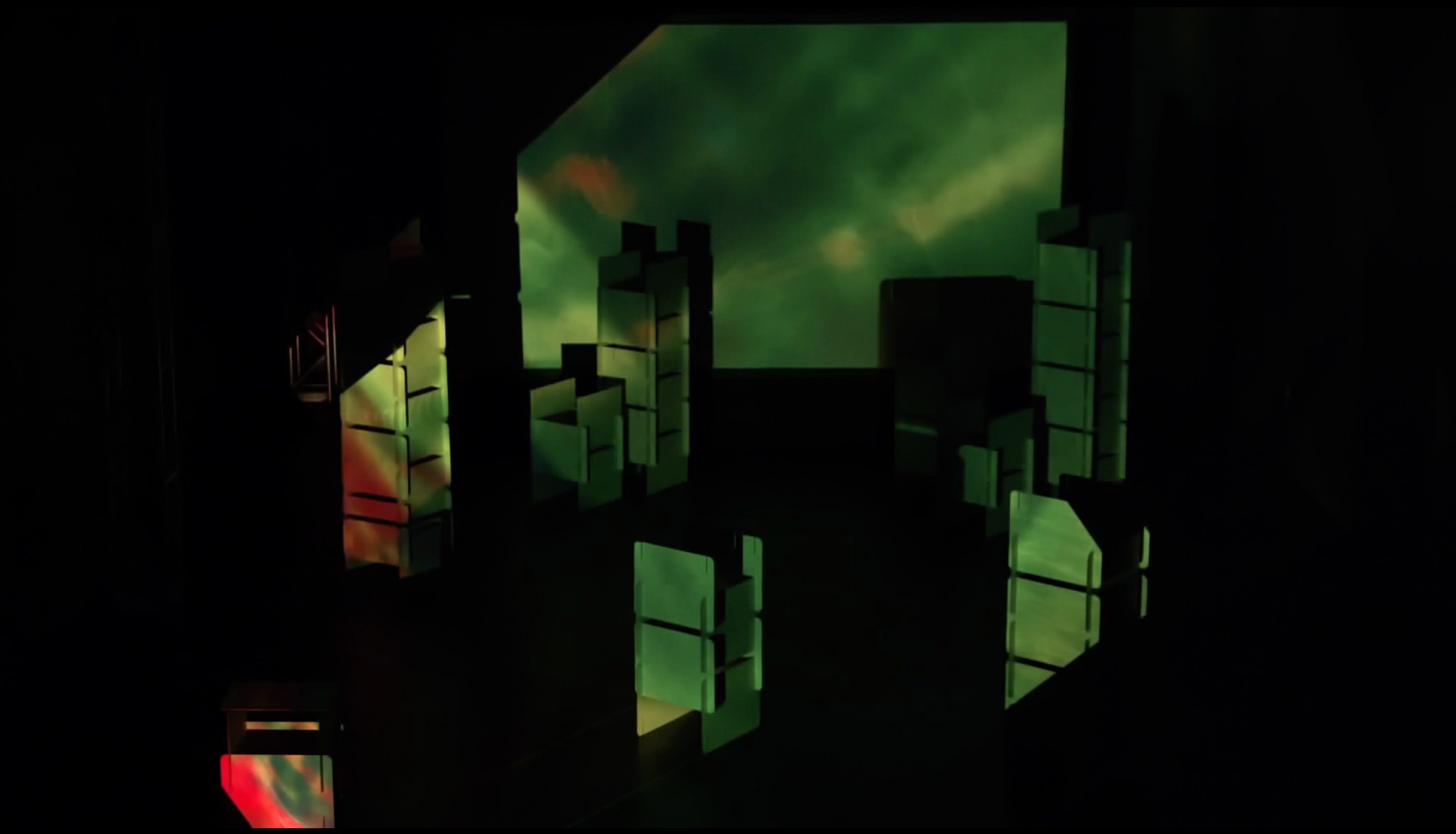
About Tresholds, Part 2

Study for Electronics, Organ and Piano

Motion Parallels

Live at the Montauk Club

End Words, w/ C. Trapani and Ekmeles

4 / a lattice of unplanned measurements

Stockhausen In the Sky I am Walking w/ Ekmeles

Pulse, Drift, Ping, Echo @ Cooper Hewitt

Monteverdi Vespers/John Eliot Gardner

Woven @ Mercedes-Benz Arena, Shanghai

River and State

About Thresholds, Part 1
About Thresholds, Part 3

Trace Reverb Trace

Dioicus, pt. 1a

A flower grew out of the ocean

Dioicus, pt. 1b

Orpheus Fragments, w/ Carduus Choir

Stockhausen In the Sky I am Walking, Excerpts

Caesura @ Urban Glass

Monteverdi Vespers, live performance

Woven @ Nat Theater Academy, Shanghai
